
در این مقاله یک مدل ویلچر معرفی شده که از یک ربات موازی 3-RRS جهت نصب صندلی استفاده می کند. این مکانیزم این امکان را می دهد که علاوه بر کنترل ارتفاع صندلی در ویلچر، دوران های جانبی را نیز کنترل کند. استفاده از ربات RRS-3، کنترل وضعیت افقی صندلی و همچنین ساخت نمونه با استفاده از پرینتر سه بعدی، به عنوان نوآوری های پروژه معرفی می شوند. چند قطعه، قابل اضافه کردن از عقب به ریل پایینی ویلچر هستند که می توانند ویلچر را از واژگونی به پشت محافظت نمایند. این قطعات می توانند به جلوی ویلچر نیز متصل شده و آن را از جلو نیز محافظت نمایند. یک نوع از آنها از چرخ استفاده می کند تا در تماس با زمین باعث توقف ناگهانی ویلچر نگردد. در این پروژه برای طراحی مکانیکی ربات از روش نمونه سازی سریع توسط پرینتر سه بعدی استفاده شده است. برای ساخت اشیای سه بعدی توسط پرینتر سه بعدی بعد از مشخص شدن طرح نهایی، مواد خام بطور کنترل شده به اندازه و شکل مشخص در نقاط مورد نظر قرار می گیرد تا بتوان در نهایت به شکل نهایی دست یافت.


بخش طراحی الكترونيكی ویلچر
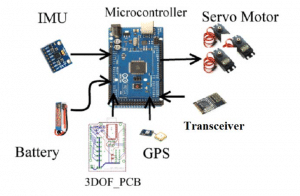
در طراحی الکترونیکی این ربات از میکرو کنترلر، منبع تغذیه، سنسورها، عملگرها و طراحی مدارات الکترونیکی که برای کنترل، هدایت و ارتباطات است، استفاده شده است (شکل 1).
شکل 1: بلوک دياگرام قسمت الكترونيكی ربات
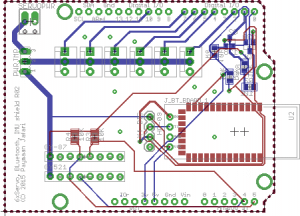
برای سنجش وضعیت ربات از سنسورهای اندازه گیری اینرسی و شتاب استفاده شده است. عملگرهای این ربات از سروو موتورهایی با گشتاور زیاد و جرم کم برای رسیدن به یک ربات موازی فضایی سبک با قابلیت حمل بار زیاد انتخاب شده اند. در این ربات برای دریافت داده های سنسورها، ترکیب و پردازش محاسبات رباتیک و انتقال اطلاعات از میکرو کنترلر ATMEGA2560 استفاده شده است. گیرنده فرستندهی رادیویی برای ارسال داده های استخراج شده از ربات به کنترل از راه دور و دریافت فرامین از آن بکار برده شده است. برای مسیریابی و موقعیت یابی ربات از یک سنسور GPS نیز استفاده شده است. طرح الکترونیک ربات به طور خلاصه در شکل (2) آمده است. برای برقراری ارتباط میان سنسورها و میکرو کنترلر و همچنین راه اندازی سروو موتورها که به جریان الکتریکی زیاد نیاز دارند، مدار واسط طراحی شد (شکل 3).
شکل 2: طراحی الكترونيكی ربات
شکل 3: مدار طراحی شدهی واسط ميكروكنترلر، سنسورها و غيره
این ویلچر قابلیت ایستادن و حرکت را مشابه کلیه اسکوترهای دو چرخ دارد ولیکن در کنترل ضد واژگونی نیاز به کارهای بیشتری دارد. به منظور حفظ تعادل ويلچر در طرح دوم سعی شد تا که قسمت متحرک ویلچر دارای وضعیت خود تعادلی مناسبتر و در عین حال توانایی گذشتن از موانع مختلف را داشته باشد. به همین علت قسمت متحرک اصلی ویلچر بصورت شنی ساخته شد. این نوع چرخ در ویلچرهای مختلف قابل مشاهده است. با استفاده از ترکیب مکانیزم صندلی و این نوع چرخ، عملکرد مناسبی در زوایای مختلف حرکتی عرضی و طولی دیده شد. به منظور حفظ تعادل بیشتر، صفحه افقی بالایی اندکی به سمت خلاف شیب حرکتی متمایل شده تا مرکز ثقل در تمامی شرایط وضعیت مناسبی داشته باشد. این زاویه بسته به وزن قسمت متحرک ویلچر، وزن استفاده کننده و سرعت حرکت برنامه ریزی شده است.
شکل 4: شکل نهایی ویلچر ساخته شده
در این طرح مدل های ویلچر توسط پرینتر سه بعدی بدنه ی ربات ساخته و سپس سخت افزار الکترونیکی و نرم افزار کنترلی آن نوشته شد. در نهایت با استفاده از نمونه ی اولیه ربات، تست های لازم برای رسیدن به پایداری انجام و سپس برای بهینه کردن آن بارها طراحی تکرار و تصحیح شد. این فرایند سبب شد که با توجه به استفاده از پرینتر سه بعدی، فرآیند ساخت قطعات ربات بسیار سریع تر و کم هزینه تر از روش های دیگر انجام شود. بر همین اساس دو مدل ویلچر دو چرخ و محرک شنی ساخته و مورد آزمایش قرار گرفت.| حرکت ویلچر دو چرخ بر اساس عدم ایجاد تعادل و تمایل حرکت مرکز ثقل به سمت جلو است. به همین علت سرنشین را به سمت جلو متمایل کرده و از طرف دیگر سعی در توازن سرنشین می کند. تلفیق دو حرکت نیاز به پیش بینی وضعیت روبرو، پردازش سریع و بهنگام حرکت های کنترلی، حرکت سریع موتورهای جلوبرنده و ایجاد توازن دارد. منبع: نشریه پژوهشی مهندسی مکانیک ایران پیشنهاد مهام ویلچر: [display-posts category=”articles” posts_per_page=”10″]


